 直接当ページへの来訪者は
直接当ページへの来訪者はヒトの活動の根源の一考察 ロボットと対比してヒトの活動の根源を探る |
| ▼ Roots of Human Activity:ヒトの活動の根源:人間活動のルーツ →
English |
 |
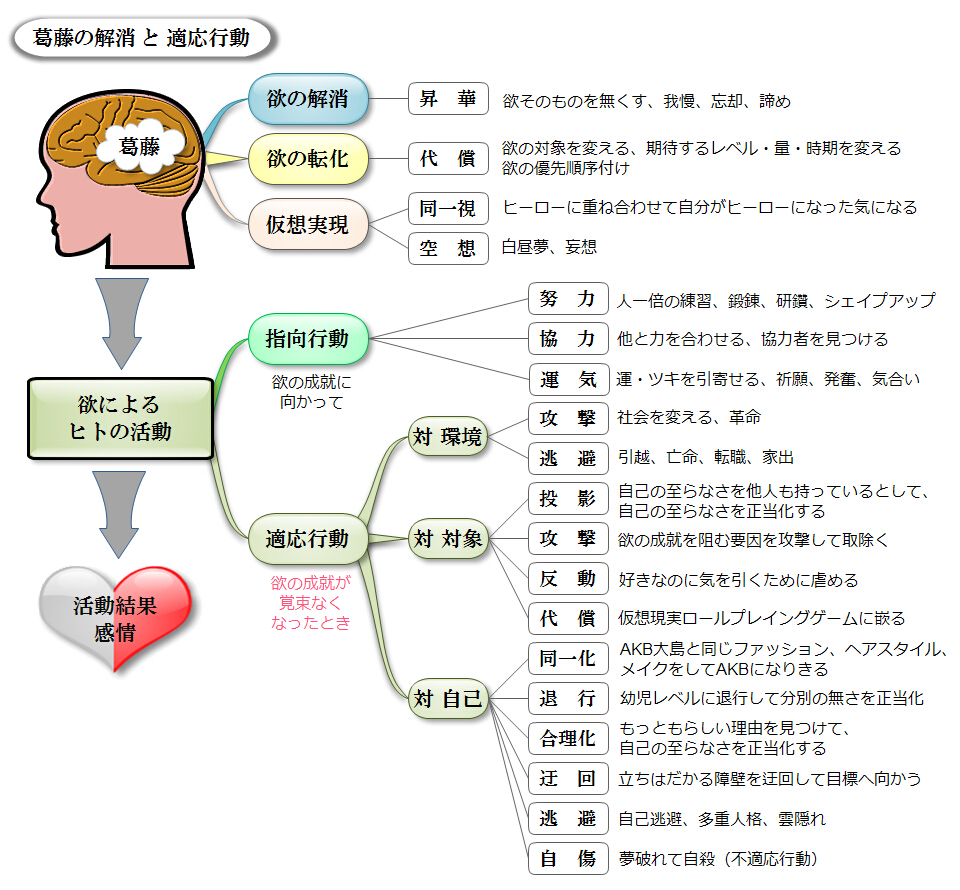
| ▼ Resolution of Conflicts and Adaptive behavior:葛藤の解消と適応行動 →
English |
 |
| 【仮定1】ロボットはイベントドリブン型オートマトン ・ イベントドリブン → 外界からの働きかけ(刺激・トリガ)によりアクションを起こすこと ├→ 外界からの働きかけが無ければアクションを起こさない ├→ スイッチがONになる・センサーが反応するなどでアクションを起こす ├→ 言われなければやらない ├→ 自発的アクションをしない ├→ タイマーによる起動は一見自発的アクションに見えるが、 │ タイマーをセットするのは外界からの働きかけである ├→ 突然思い立ってのアクションは無い ├→ └→ ・ オートマトン → トリガに応じて予め定められたアクションをする自動機械のこと ├→ 想定外のアクションをしない ├→ ランダムジェネレータによりアクションにバリエーションを │ 与えたとしてもそれも想定内 ├→ 学習によるアクションの変化は? │ 学習アルゴリズムは予め定められているので、学習結果も想定内である │ 学習アルゴリズムそのものを換装されてしまったら? │ HAL9000 コンピュータはこの換装を自力で行ったのか? ├→ └→ |
| 【仮定2】ロボットは創造者の意のまま ・ オートマトンである限り創造者(設計者)の意の範囲外のアクションをしない ・ オートマトンは工業製品であるから、個体によって品質のばらつきはない ・ 性能は仕様書によって規定される |
| 【仮定3】ロボットに欲は無い ・ 欲のための活動をしない ・ ホンダの ASIMO 君にチップを渡しても喜ばない ・ ホンダの ASIMO 君に銃を向けても怯えないし、逃げようともしない |
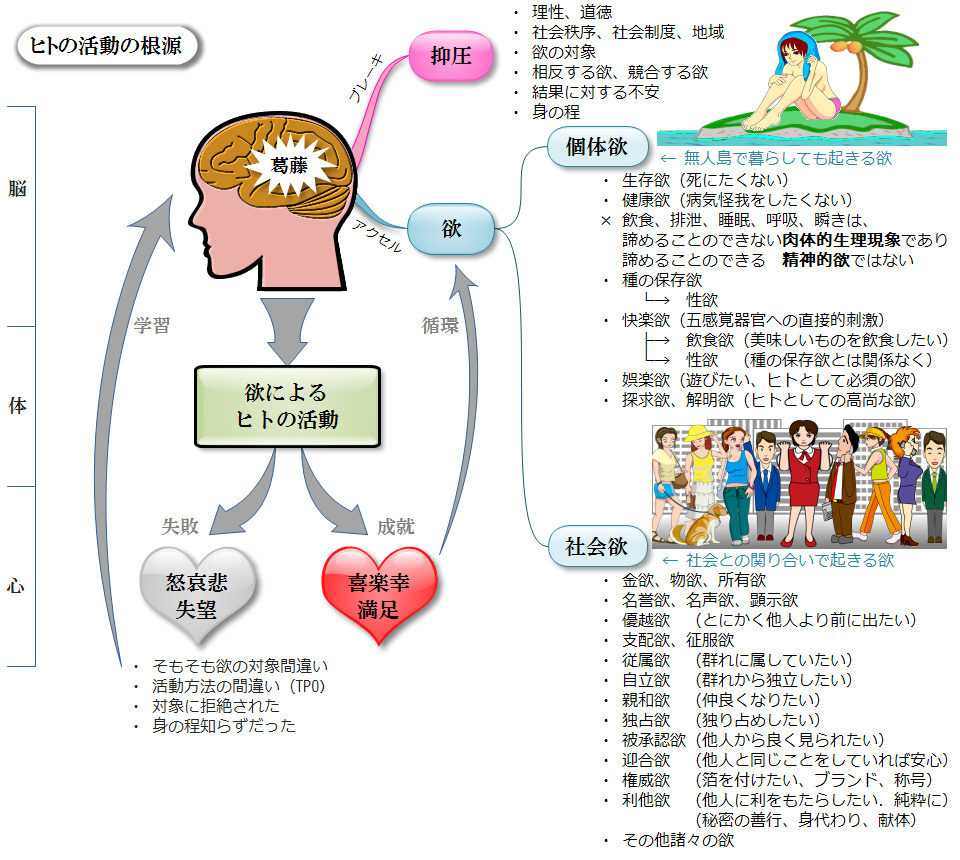
| 【推 論】ヒトは欲により活動する ・ 前記仮定1〜3よりヒトとロボットの最大の違いは、欲が有るか無いかである ・ 前記仮定1〜3を崩せばロボットはヒトになる ・ ヒトは仮定1に反して、自発的活動を起こす ・ ヒトは仮定2に反して、創造者(両親)の意のままにならず ・ ヒトは仮定3に反して、欲により活動する ・ ヒトは欲が無ければ活動を起こさない ・ 欲は脳内の化学反応で発生する ・ 化学反応する部位と量が個体により相違することが個性となる ・ 欲を抑圧する別の化学反応が同時に起こり、これが理性となる ・ 感情( 葛 藤 )は欲を抑圧する際に具現するもの ・ 感情(喜怒哀楽)は欲を満たす行動の結果で具現するもの ∴ 従って 欲があるから感情が具現する |
| ▲ 上のマインドマップはフリーの Edraw MindMap で作成しました。 ▲ 上図の脳のイラストと人物のイラストは 商用OK! フリーのイラスト集 - ビジネス素材のビジソザ bsoza.com さんから戴きました。感謝。 星の数ほどある素材サイトの中で秀逸です。  http://bsoza.com/ http://bsoza.com/ |
| ■ アンチテーゼ:ヒトは無欲の活動をすることが有る という一家言をお持ちの方はご意見をお寄せください。 スパム防止のためアドレスをタイプインしてください。 |
| ■ KeyWord:本能、個体欲、社会欲、生存欲、健康欲、飲食欲、排泄欲、睡眠欲、独占欲、相反する欲、競合する欲、欲の対象、 昇華、投影、社会秩序、抑圧、葛藤の解消、適応行動、成就、喜怒哀楽、感情、失望、学習、無人島、図解、 不安、解消、要因分析図、欲望、欲求、抑圧、循環、欲の転化、欲の解消、仮想実現、指向行動、逃避、 代償、自傷行動、攻撃、反動、同一化、退行、合理化、迂回、空想、 |
![]()